Navigating Documentation
~15 min
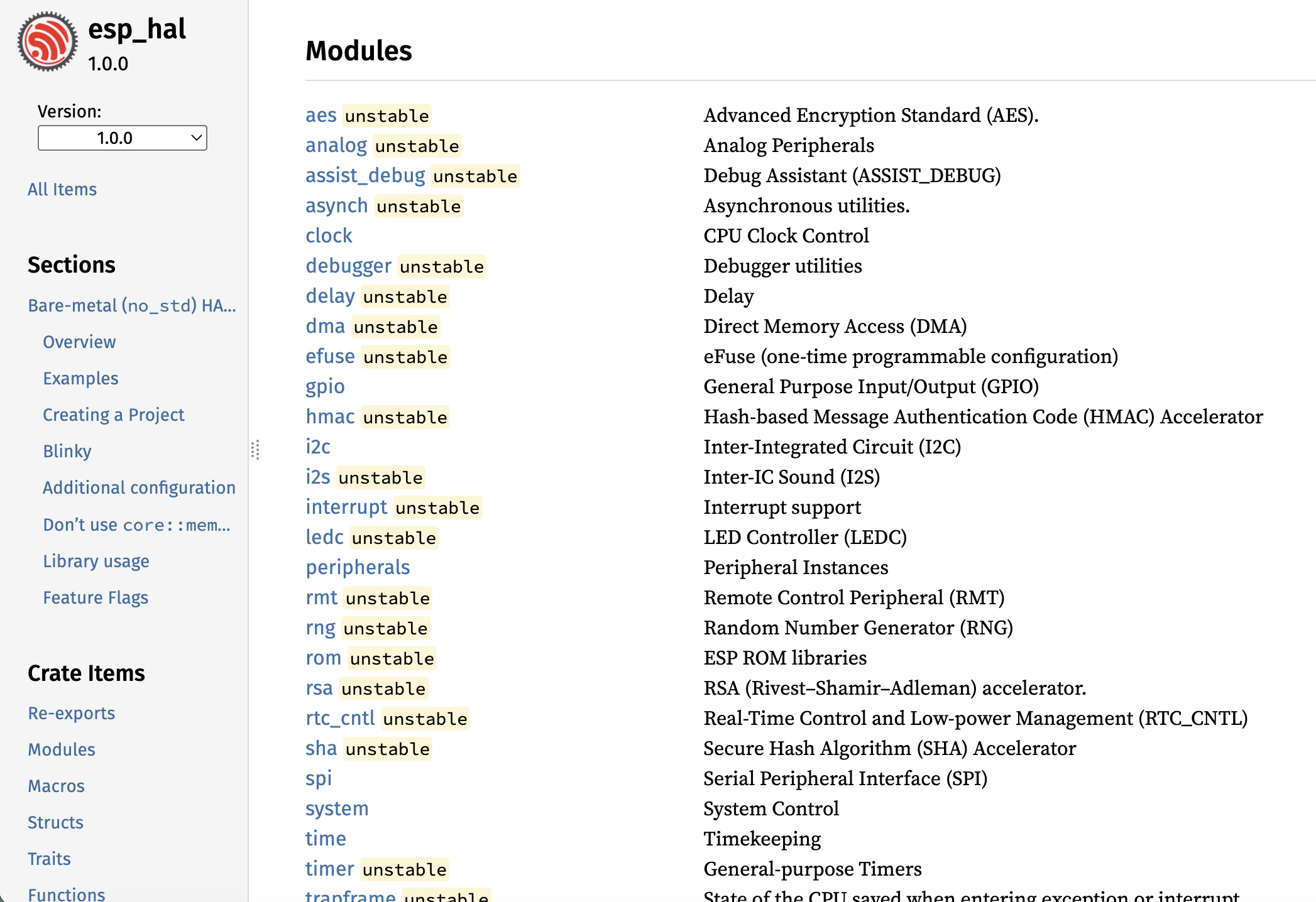
Navigate to the Peripheral Module
Each peripheral typically gets its own module in a HAL crate. You can find the module list by navigating to the bottom of the crate's documentation page.
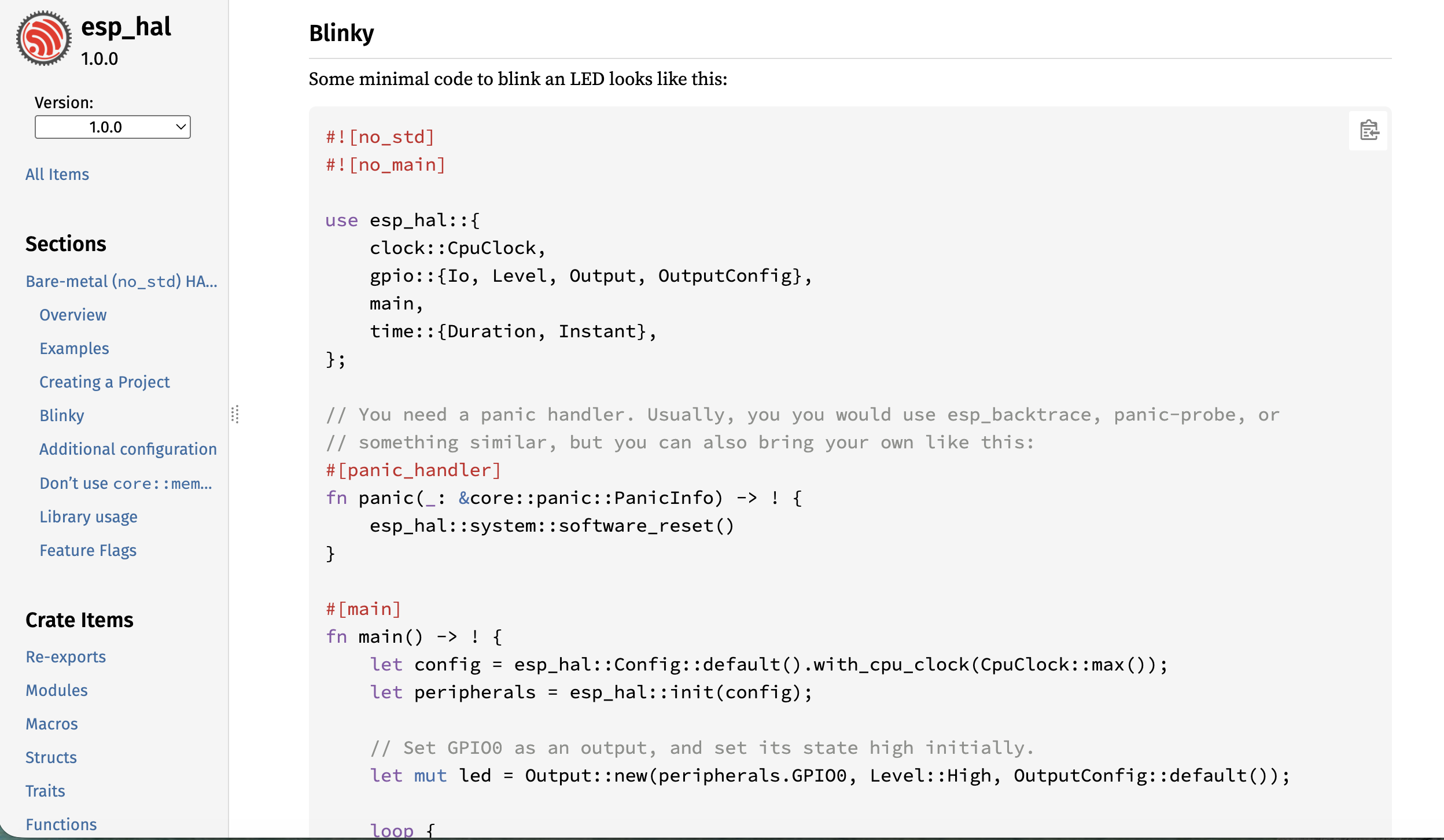
Find an Example for Your Peripheral
Simple examples are often shown directly in the module documentation. Most HAL repos also have a dedicated examples directory that you can browse on GitHub.
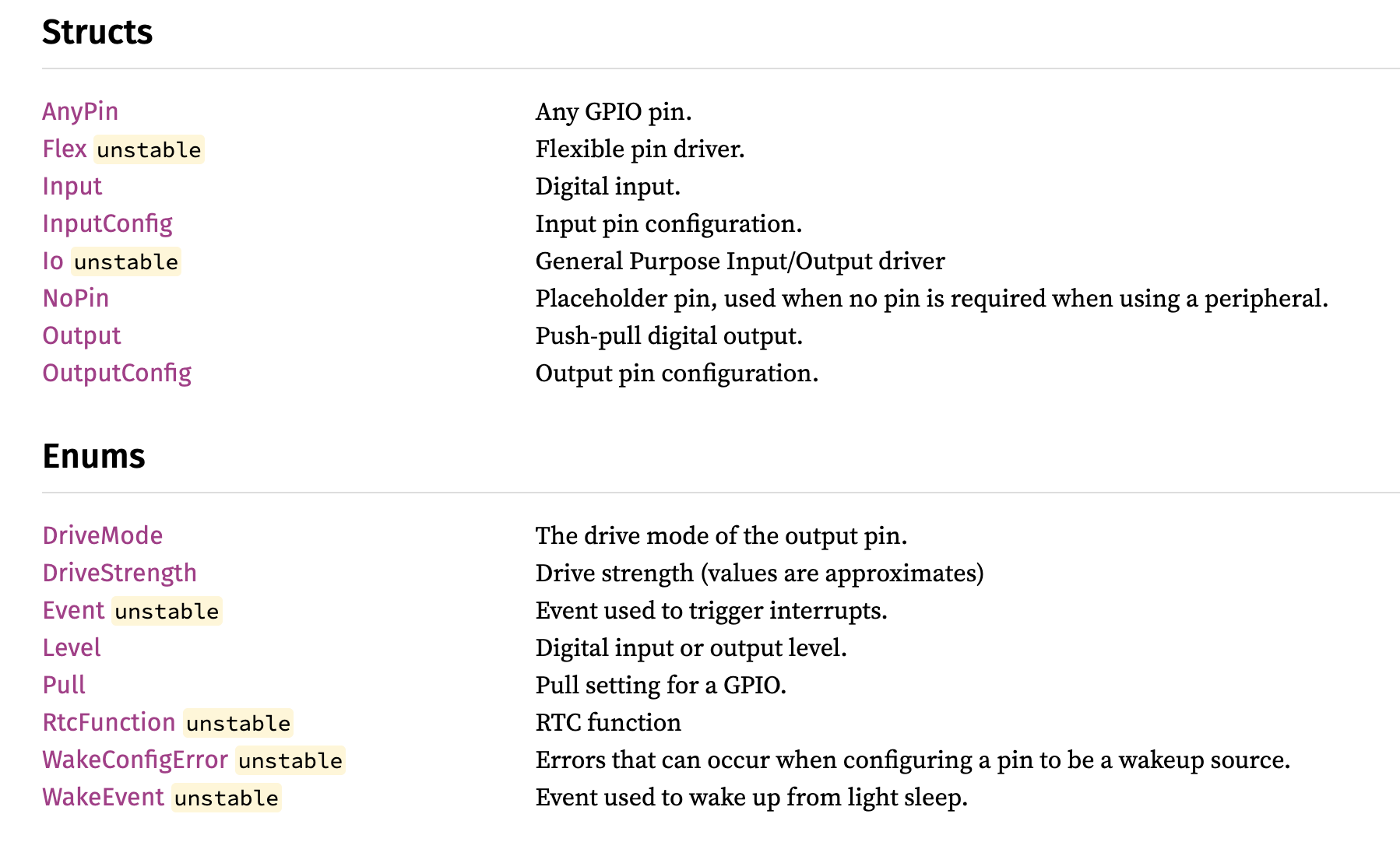
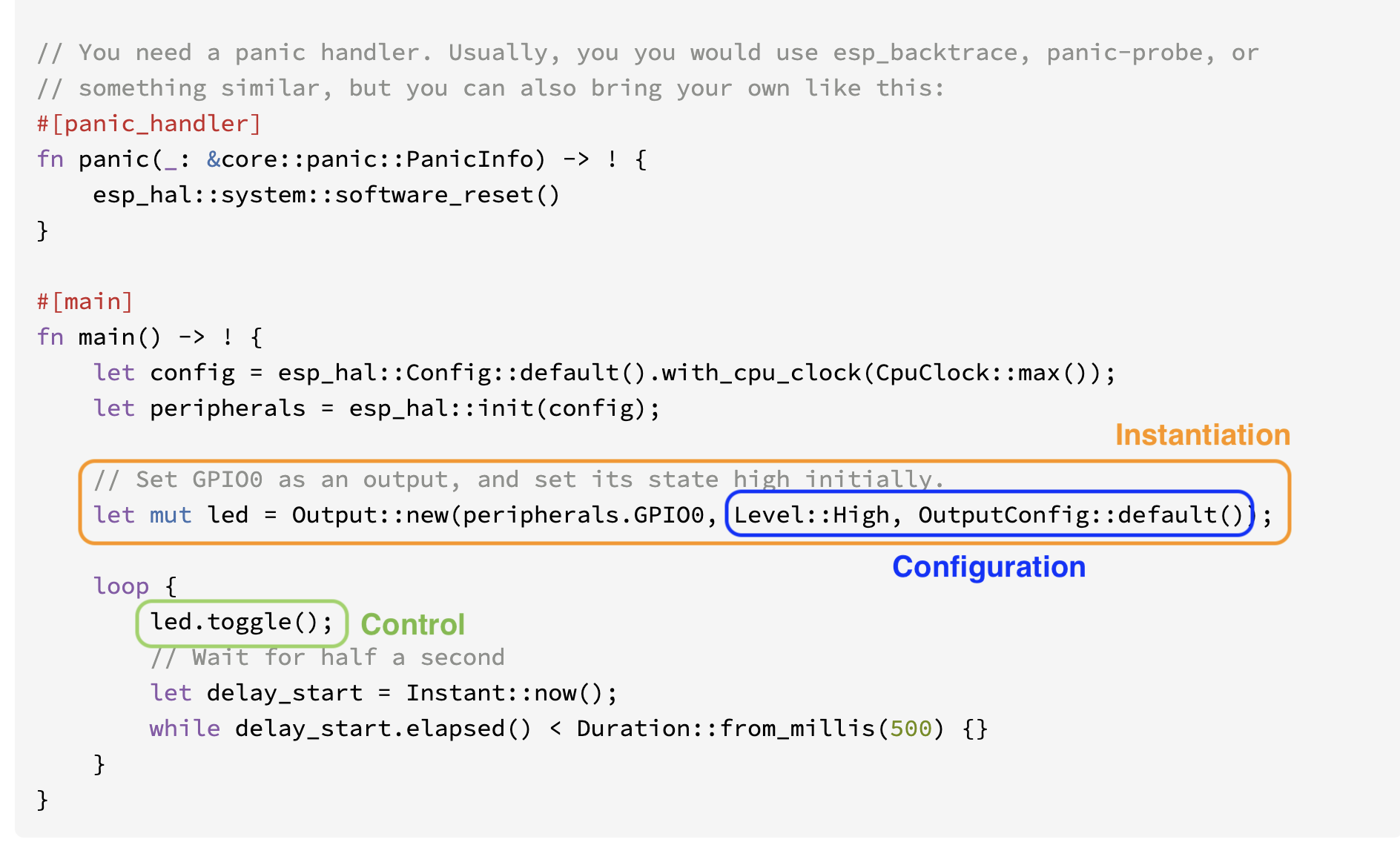
Identify the Peripheral Driver Struct
Use the example to apply the mental model. Identify the driver struct and how it is instantiated, configured, and controlled.
Access the Driver Struct
Once you have identified the driver struct, navigate to its documentation page. There you will find the configuration and control methods available to you.